CONSERVATION OF ANGULAR MOMENTUM
Why do we move our arms when we run? What is the best method of swinging the arms?
By the end of this chapter you should be able to:
•Explain the concept of conservation of momentum in the context of sporting movements
•Describe how athletes can control body rotations through the deliberate rotation of body segments
•Explain how to swing the arms during running to reduce unwanted body rotations and optimise force production
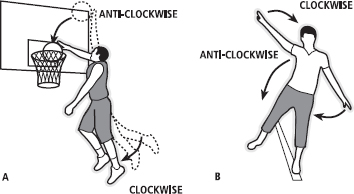
Most human movements are characterised by a large number of body segments simultaneously moving in circles. When we run, our legs cycle while our arms move through an arc from the front to the back of our body and back again. As Newton described, every action has an equal and opposite reaction, so when we choose to move our limbs through a cycle motion an opposing ‘reaction’ rotation must be created somewhere else. You can see this clearly when a basketball player ‘slam dunks’ a ball through the hoop, as in Figure 8.1 (A). The forward and downward rotation of the arm during the dunk creates an equal and opposite reaction rotation in the legs. Because the legs have a greater inertia, there is less noticeable movement in them.
FIG. 8.1 Rotation of one body segment causes a reaction rotation in other body segments, according to Newton’s Third Law. A: a basketball player ‘slam dunking’ a ball. B: an athlete balancing inside a playing area.
You can also see this effect when a person loses balance. By circling the arms in one direction, the body rotates in the other, as in Figure 8.1 (B). This is the principle of Newton’s Third Law:
For every angular action there is an equal and opposite angular reaction
We could also say that when the person in Figure 8.1 (B) started to fall, they had little angular momentum. Energy can neither be created nor destroyed but remains constant; for example, the electrical energy going into the filament of a light bulb is turned into exactly the same amount of heat and light. The energy of a moving system also remains constant. Whatever momentum was there to start with must remain in the system unless an external force acts to change it (remember, the moving bus in Chapter 5 only stops if air resistance, friction or the brake acts to slow it). The Law of Conservation of Momentum states:
The total (angular) momentum of a system remains constant unless external forces influence the system
Angular momentum is increased when we swing our arms vigorously, so another part of our body will tend to rotate in the opposite direction to reduce the total angular momentum; the total momentum remains constant.
The concept of conservation of momentum can be used to explain a number of phenomena. A diver leaves a springboard with a certain amount of angular momentum, created by the reaction force of the springboard on the diver. Once in the air, he alters his rotation by manipulating his body about the centre of mass (just like the high jumper in Chapter 6) but the total angular momentum remains constant. So how do divers spin quickly when performing a somersault? They bring their limbs close to their centre of mass so that the radius of gyration is smaller (the radius of gyration, as you will remember from Chapter 7, is the distance of the mass from the centre of rotation). This reduces the moment of inertia (I) of the body and since angular momentum (Iω) is conserved, the angular velocity (ω) increases. When the diver is about to enter the water, they will open their body up (i.e. extend their limbs) to increase their inertia, reduce their angular velocity and so aim for a streamlined entry into the water.
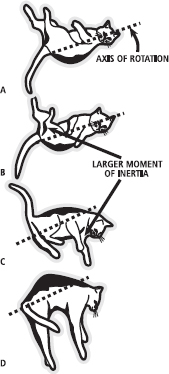
A cat uses this principle to land on its feet when dropped upside down from a height (Figure 8.2). First, the cat lengthens its lower limbs to increase the moment of inertia and draws in its upper limbs to decrease it. When the cat rotates its upper body, the lower body only rotates a small amount in the opposite direction. It then brings its lower limbs closer to the body and extends its upper limbs to bring the lower body around. During this sequence it also displaces its lower, then its upper, body away from the axis of rotation to further alter the moment of inertia of these parts. With no change in total angular momentum, the cat is able to right itself. Other animals, including humans, are also capable of such Houdini acts.
FIG. 8.2 Cats are able to land on their feet by initiating a spin first with their upper body, which has lower moment of inertia relative to the lower body and spins about the axis of rotation, then with their lower body.
The answer to the arms is in the legs
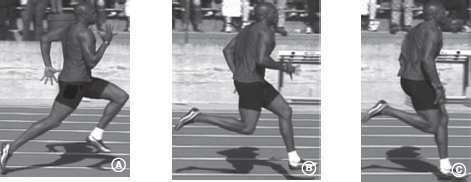
What has this to do with swinging the arms in running? – the need to conserve angular momentum. Start with what’s happening in a runner’s legs. We can take a point when the left leg is in front of our body and the right leg is behind, as in Figure 8.3A; at the absolute ends of one stride the legs essentially have zero velocity so their momentum is zero. The left leg will be accelerated backwards and down towards the ground, as in Figure 8.3B. The leg moves to the side of the midline (or centre of mass) and so in a sense is actually rotating around the body (if we were looking down on the runner, the leg would be moving anti-clockwise), as shown in Figure 8.4. Since its mass is a good distance from the hip and is therefore moving at a high velocity (remember for a given angular velocity, the linear velocity of a mass is greater if it is further from the centre of rotation: v = rω), the momentum of the leg will be large. This must be opposed by another angular momentum to maintain a total of zero. In this instance, the upper body would be rotated away from the right leg (that is, clockwise if viewed from above; see Figure 8.4).
FIG. 8.3 Leg motion in sprint running. See text for details.
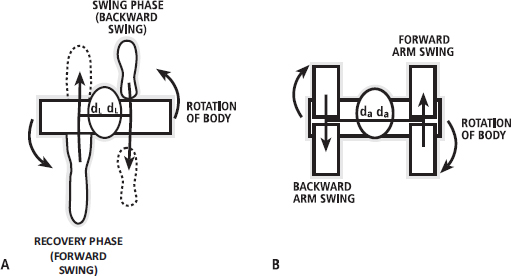
FIG. 8.4 In diagram A, the right leg is swung backwards (dark foot = start, dashed foot = finish) while the left leg is ‘recovered’ to the front of the body. These two movements are performed at a distance (dL; distance of leg) from the body’s centre of rotation and cause an anti-clockwise rotation of the body as viewed from above. In diagram B, the relatively lighter arms are shown to swing in the other direction at a slightly greater distance (da; distance of arm) from the centre of rotation of the body causing an opposite, clockwise, rotation of the body as viewed from above.
At the same time, the right leg will be accelerated forwards, again to the side of our midline or centre of mass and again it is rotating around the body. While this leg is highly flexed (remember from Chapter 7 that the right leg, the recovery leg, is flexed to decrease its moment of inertia and make it easier to accelerate forwards) it still has angular momentum, which must be opposed. Since the right leg is effectively moving in an anti-clockwise direction if viewed from above, the upper body must rotate clockwise to conserve momentum (as shown in Figure 8.4).
At some point, the left leg will strike the ground, which provides an equal and opposite reaction force (Figure 8.3C). Unfortunately, our feet don’t always land underneath our centre of mass. The more slowly we run, the more likely we are to place our feet under our centre of mass but at the fastest running speeds the feet land more to the side of the midline. So this reaction force not only accelerates us upwards and forwards but also spins us around (creates a torque or moment of force). The direction of this torque is towards the right (clockwise if viewed from above), so the body is rotating partly because of the left leg moving backwards, partly because of the right leg moving forwards and partly because the ground reaction force is spinning us around. The upper body would be thrown right then left as the legs cycle during running. That’s not a very good way to run forwards at speed and would also look incredibly silly!
This is where the arms come in. If we swing the right arm from the front to the back of the body in the sagittal plane (that is, from in front past our hip; see Chapter 2), it is essentially rotating clockwise around the body if viewed from above. This causes a rotation of the body in the anti-clockwise direction, opposite to that caused by the legs. The more quickly the arm swings the more angular momentum it possesses, so the more opposing momentum is induced in the body. At the same time, the left arm swings from the front to the back of the body, which also causes the body to rotate clockwise. So, arm swing plays a large part in conserving angular momentum in the runner. Hinrichs (1987) showed that nearly all the rotational momentum produced by the legs is counteracted by arm swing and upper body rotation during moderate-speed jogging (3.8–5.4 m·s-1) and that the contribution of the arms increased as running speed increased. In sprinting, there is little upper body rotation, so the arms play a far more important role.
This is not quite the end of the story. The angular momentum of the legs varies through the stride. For example, the left leg starts its downward and backward movement while still flexed; because the mass is not moving as quickly past the body it takes time to accelerate the leg. So, the velocity of the leg is greatest just before the time of contact between the foot and the ground. The angular momentum of the leg is therefore also highest at this point. Additionally, the ‘recovery’ leg is at its maximum forward speed (relative to the body) at this point. Finally, the torque created by the ground reaction force starts midway through the movement, so the angular momentum of the body is significantly changed at this point. Effectively, the angular momentum of the legs increases through the movement and peaks during foot–ground contact. The arms must precisely counter this by producing an equal and opposite angular momentum, which is greatest during foot–ground contact.
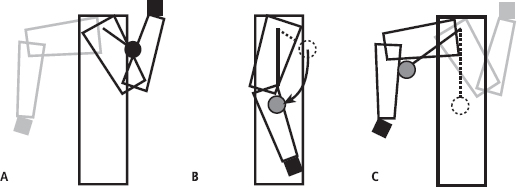
A runner starts with their swing arm (the arm that’s moving backwards) in a shortened position, as in Figures 8.3A and 8.5A; the greater mass of the arm is located close to the shoulder and its velocity is low. Therefore, the angular momentum of the arm is small. As the angular momentum of the legs increases, the arm is accelerated and the elbow is extended, so that the mass of the arm is further away from the shoulder and is therefore moving faster. At foot–ground contact, the arm is extended rapidly to counter the large rotation of the upper body, since the angular velocity of the arm is greater and the mass is moved further from the shoulder. As the leg passes under the body, less force is applied to the ground and eventually the leg slows in readiness for its recovery to the front of the body (and the recovery leg slows in readiness to swing towards the ground). The arm therefore slows and recoils (shortens) so that its momentum is reduced. We use our arms directly to counter the rotations created by the legs. Often, errors in leg technique can be seen as variations in this optimum arm swing. Coaches and athletes should watch the arms closely to understand what is happening with the legs.
FIG. 8.5 The swing arm (bold) starts in front of the body in a shortened position (A). As the legs accelerate, and particularly once the foot of the swing leg has made contact with the ground, the arm is extended rapidly (B). The increase in angular velocity of the arm as well as the movement of the mass further away from the shoulder, which causes a further increase in the velocity of the centre of mass of the arm, increases the angular momentum of it (H = mk2ω). As the legs come to the end of their swing, the arm shortens again and its angular velocity slows (C). In this way, the opposing angular momentum of the arm closely matches that of the legs.
The optimum arm swing is one where the arms are rotated backwards in the sagittal plane in opposition to the legs. Because the angular (rotational) momentum of the legs and the torque created by the ground reaction force vary through the stride, the length of the arms must also vary. When in front of the body, the elbow angle should be acute, so that the arm is short. At foot-strike the arm should be lengthened dramatically, by extending the elbow to increase its angular momentum as the lower body’s angular momentum is increased. As the foot moves further behind the body, the arm should be shortened to reduce its angular momentum as that of the legs decreases; the natural recoil at the elbow joint usually accomplishes this. Using this technique, the angular momentum of the upper and lower body remain equal and opposite and the runner keeps running in a forward direction.
One last point that is important: the downward and backward arm swing should be vigorous because it will result in the body being accelerated upwards and forwards (i.e. opposite to the arm), which will increase running speed according to Newton’s Third Law. The ‘recovering’ arm, moving from behind the body to the front, should not be as rapidly moved as this would force the body backwards (i.e. slow it down) and downwards, and the elbow should flex as the arm comes forward to reduce its effect on the body’s angular momentum (to create a net positive effect of the ‘drive’ arm). This is one reason why sprinters drive their arms downwards and backwards vigorously, but allow the recovering arm to move forwards more or less by the recoil of the muscles and tendons. Driving the arms downwards and backwards, not forwards, is important for achieving fast running speeds.
HOW ELSE CAN WE USE THIS INFORMATION?
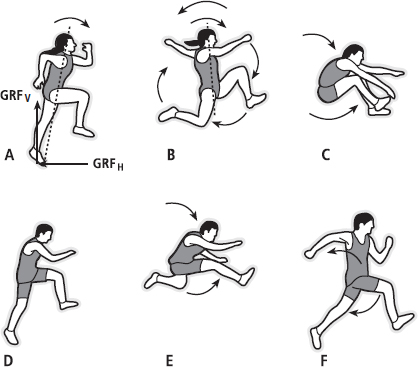
We see uses of this technique in many other sports. In the long jump, the hitch-kick technique uses forward rotations of the arms and legs while the body is in the air to counter the forward rotation of the body caused by the horizontal braking force (that is, forward force) at take-off, as shown in Figure 8.6 (A to C). Similarly, optimum hurdle clearance in sprint hurdling requires prominent and rapid rotation of the upper body to conserve angular momentum as the legs rotate up over the hurdle then back down to the ground (Figure 8.6 (D to F)). When jumping to catch a ball, rugby and Australian Rules football players jump off one leg, which swings downwards, while swinging the other leg upwards to maintain balance. In fast bowling in cricket and the delivery phase of javelin throwing, exponents use a run-up and delivery stride (in which the feet are stopped) to create a large forward angular momentum of the body, which allows the upper body to rotate forwards to project the ball or javelin while maintaining a near-zero momentum change. The effectiveness of the run-up and delivery strides are important factors affecting the velocity of the bowl or throw.
FIG. 8.6 The torque created by the horizontal ground reaction force (GRFH) causes a forward rotation of the body (bold arrow) during the long jump take-off (A). Forward cycling of the arms and legs using the hitch-kick technique results in a backward rotation of the body allowing the legs to prepare for landing (B). Finally, the swinging of the legs to the front of the body causes a reactive forward rotation of the upper body to conserve angular momentum (C). Optimum leg cycling is important in order to maximise landing distance. In the sprint hurdles, the athlete takes off with relatively little forward–backward angular momentum (D). To rapidly lift the lead leg (left leg in diagram E), an opposite forward rotation of the upper body is necessary. A forceful backward rotation of the upper body is also important to counter the rotation of the leg back down towards the ground after hurdle clearance (F). Prominent and rapid upper body rotation is important in order for the legs to clear the hurdle quickly while the height of the body’s centre of mass varies little.
Useful Equations
angular momentum (H or L) = Iω or mk2ω
angular impulse–momentum relationship, τ·t = Iω
moment of inertia (I) = Σmr2 or mk2
total moment of inertia (parallel axes theorem) (Itot) = ICM + md2
Reference
Hinrichs, R.N. (1987). ‘Upper extremity function in running. II: Angular momentum considerations’. International Journal of Sport Biomechanics, 3: 242–63.
Hyperphysics (http://hyperphysics.phy-astr.gsu.edu/hbase/amom.html). Basic and advanced discussions on angular momentum, including maths simulations and calculations.
ZonaLand: National Science Teachers Association (http://zonalandeducation.com/mstm/physics/mechanics/mechanics.html). Clear descriptions and animations of the basic principles of mechanics.
The Physics Classroom – Tutorials (http://www.physicsclassroom.com/Class/). Lessons on basic physics concepts.
The Physics Classroom – Multimedia tools (http://www.physicsclassroom.com/mmedia/). Interactive tools and movies depicting basic physics concepts.
The Physics of Sports (http://www.topendsports.com/biomechanics/physics.htm). Website investigating the applications of physics in sports.