9.6. Low Reynolds Number Viscous Flow Past a Sphere
Many physical problems can be described by the behavior of a system when a certain parameter is either very small or very large. Consider the problem of steady constant-density flow of a viscous fluid at speed U around an object of size L. The governing equations will be (4.10) and the steady flow version of (9.1):
 (9.44)
(9.44)
As described in Section 4.11, this equation can be scaled to determine which terms are most important. The purpose of such a scaling is to generate dimensionless terms that are of order unity in the flow field. For example, when the flow speeds are high and the viscosity is small, the pressure and inertia forces dominate the momentum balance, showing that pressure changes are of order ρU2. Consequently, for high Reynolds number, the scaling (4.100) is appropriate for non-dimensionalizing (9.44) to obtain:
 (9.45)
(9.45)
where Re = ρUL/μ is the Reynolds number. For Re ≫ 1, (9.45) may be solved by treating 1/Re as a small parameter, and as a first approximation, 1/Re may be set to zero everywhere in the flow, which reduces (9.45) to the inviscid Euler equation without a body force.
However, viscous effects may still be felt at high Re because a single length scale is typically inadequate to describe all regions of high-Re flows. For example, complete omission of the viscous term cannot be valid near a solid surface because the inviscid flow cannot satisfy the no-slip condition at the body surface. Viscous forces are important near solid surfaces because of the high shear rate in the boundary layer near the body surface. The scaling (4.100), which assumes that velocity gradients are proportional to U/L, is invalid in such boundary layers. Thus, there is a region of non-uniformity near the body where a perturbation expansion in terms of the small parameter 1/Re becomes singular. The proper scaling in the boundary layer and a procedure for analyzing wall-bounded high Reynolds number flows will be discussed in Chapter 10. A hint of what is to come is provided by the scaling (9.14), which leads to the lubrication approximation and involves different length scales for the stream-wise and cross-stream flow directions.
Now consider flows in the opposite limit of very low Reynolds numbers, Re → 0. Such flows should have negligible inertia forces, with pressure and viscous forces providing the dominant balance. Therefore, multiply (9.45) by Re to obtain:
 (9.46)
(9.46)
Although this equation does have negligible inertia terms as Re → 0, it does not lead to a balance of pressure and viscous forces as Re → 0 since it reduces to 0 = μ∇2u, which is not the proper governing equation for low Reynolds number flows. The source of the inadequacy is the scaling of the pressure term specified by (4.100). For low Reynolds number flows, pressure is not of order ρU2. Instead, at low Re, pressure differences should be scaled with a generic viscous stress such as μ∂u/∂y ∼ μU/L. Thus, the pressure scaling p∗ = (p – p∞)/ρU2 in (4.100) should be replaced by p∗ = (p – p∞)L/μU, and this leads to a correctly revised version of (9.46):
 (9.47)
(9.47)
which does exhibit the proper balance of terms as Re → 0 and becomes the linear (dimensional) equation:
 (9.48)
(9.48)
when this limit is taken.
Flows with Re → 0 are called creeping flows, and they occur at low flow speeds of viscous fluids past small objects or through narrow passages. Examples of such flows are the motion of a thin film of oil in the bearing of a shaft, the settling of sediment particles in nominally quiescent water, the fall of mist droplets in the atmosphere, or the flow of molten plastic during a molding process. A variety of other creeping flow examples are presented in Sherman (1990).
From this discussion of scaling, we conclude that the proper length and time scales depend on the nature and the region of the flow, and are obtained by balancing the terms that are most important in the region of the flow field under consideration. Identifying the proper length and time scales is commonly the goal of experimental and numerical investigations of viscous flows, so that the most appropriate simplified versions of the full equations for fluid motion may be analyzed. The remainder of this section presents a solution for the creeping flow past a sphere, first given by Stokes in 1851. This is a flow where different field equations should be used in regions close to and far from the sphere.
We begin by considering the near-field flow around a stationary sphere of radius a placed in a uniform stream of speed U (Figure 9.17) with Re → 0. The problem is axisymmetric, that is, the flow patterns are identical in all planes parallel to U and passing through the center of the sphere. Since Re → 0, as a first approximation, neglect the inertia forces altogether and seek a solution to (9.48). Taking the curl of (9.48) produces an equation for the vorticity alone:
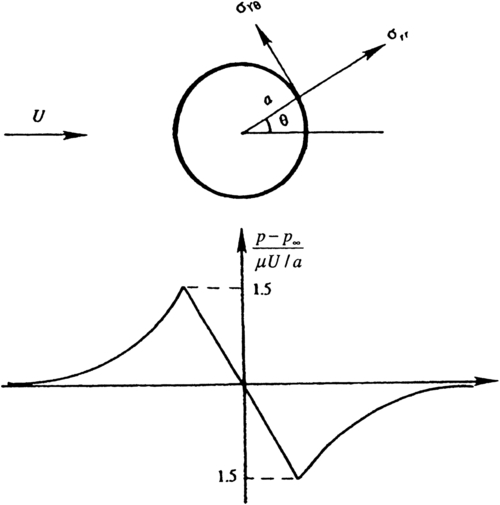
Figure 9.17 Creeping flow over a sphere. The upper panel shows the viscous stress components at the surface. The lower panel shows the pressure distribution in an axial (φ = const.) plane.

because1 ∇ × ∇ p = 0  and the order of the operators curl and ∇2 can be interchanged. (The reader may verify this using indicial notation.) The only component of vorticity in this axisymmetric problem is ωφ, the component perpendicular to φ = constant planes in Figure 9.17, and it is given by:
and the order of the operators curl and ∇2 can be interchanged. (The reader may verify this using indicial notation.) The only component of vorticity in this axisymmetric problem is ωφ, the component perpendicular to φ = constant planes in Figure 9.17, and it is given by:
and the order of the operators curl and ∇2 can be interchanged. (The reader may verify this using indicial notation.) The only component of vorticity in this axisymmetric problem is ωφ, the component perpendicular to φ = constant planes in Figure 9.17, and it is given by:
This is an axisymmetric flow, so the r and θ velocity components can be found from an axisymmetric stream function ψ:
 (7.83)
(7.83)

which is governed by:

Combining the last two equations, we obtain:2
 (9.49)
(9.49)
The boundary conditions on the preceding equation are:
 (9.50)
(9.50)
 (9.51)
(9.51)
 (9.52)
(9.52)
The last condition follows from the fact that the stream function for a uniform flow is (1/2) Ur2sin2 θ in spherical coordinates (see (7.82)).
The far-field condition (9.52) suggests a separable solution of the form:

Substitution of this into the governing equation (9.49) gives:
which is an equi-dimensional equation with power-law solutions ∼ rn. Here, the possible values for n are –1, 1, 2, and 4, so:

The far-field boundary condition (9.52) requires that A = 0 and B = U/2 while the surface boundary conditions require C = −3Ua/4 and D = Ua3/4. The solution then reduces to:
 (9.53)
(9.53)
 (9.54)
(9.54)
 (9.55)
(9.55)
which is sketched in Figure 9.17. The maximum p – p∞ = 3μU/2a occurs at the forward stagnation point (θ = π), while the minimum p – p∞ = –3μU/2a occurs at the rear stagnation point (θ = 0).
The drag force D on the sphere can be determined by integrating its surface pressure and shear stress distributions (see Exercise 9.45) to find:
 (9.56)
(9.56)
of which one-third is pressure drag and two-thirds is skin friction drag. It follows that drag in a creeping flow is proportional to the velocity; this is known as Stokes’ law of resistance.
In a well-known experiment to measure the charge of an electron, Millikan (1911) used (9.56) to estimate the radius of an oil droplet falling through air. Suppose ρ′ is the density of a falling spherical particle and ρ is the density of the surrounding fluid. Then the effective weight of the sphere is 4πa3g(ρ′ − ρ)/3, which is the weight of the sphere minus the weight of the displaced fluid. The falling body reaches its terminal velocity when it no longer accelerates, at which point the viscous drag equals the effective weight. Then:

from which the radius a can be estimated.
Millikan (1911) was able to deduce the charge on an electron (and win a Nobel prize) making use of Stokes’ drag formula by the following experiment. Two horizontal parallel plates can be charged by a battery (see Figure 9.18). Oil is sprayed through a very fine hole in the upper plate and develops static charge (+) by losing a few (n) electrons in passing through the small hole. If the plates are charged, then an electric force neE will act on each of the drops. Now n is not known but the electric field E is known provided that the charge density in the gap is very low: E = −Vb/L where Vb is the battery voltage and L is the gap between the plates. With the plates uncharged, measurement of the downward terminal velocity allowed the radius of a drop to be calculated assuming that the viscosity of the drop is much larger than the viscosity of the air. The switch is thrown to charge the upper plate negatively. The same droplet then reverses direction and is forced upward. It quickly achieves its terminal velocity Uu by virtue of the balance of upward forces (electric + buoyancy) and downward forces (weight + drag). This gives:

where Uu is measured by the observation telescope and the radius of the particle is now known. The data then allow for the calculation of ne. As n must be an integer, data from many droplets may be differenced to identify the minimum difference that must be e, the charge of a single electron.
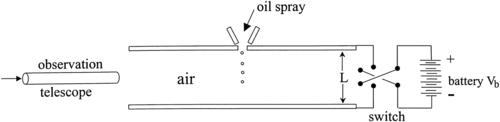
Figure 9.18 Simplified schematic of the Millikan oil drop experiment where observations of charged droplet motion and Stokes’ drag law were used to determine the charge on an electron.
 (9.57)
(9.57)
where Re = 2aU/ν is the Reynolds number based on the diameter of the sphere. This dependence on the Reynolds number can be predicted from dimensional analysis when fluid inertia, represented by ρ, is not a parameter (see Exercise 4.75). Without fluid density, the drag force on a slowly moving sphere may only depend on the other parameters of the problem:

Here there are four variables and the three basic dimensions of mass, length, and time. Therefore, only one dimensionless parameter, D/μUa, can be formed. Hence, it must be a constant, and this leads to CD ∝ 1/Re.
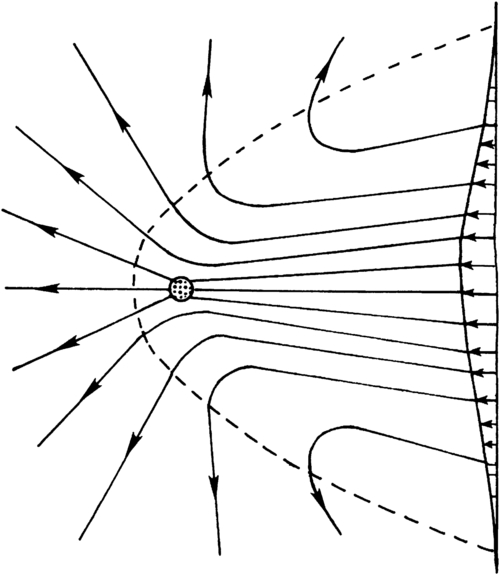
The flow pattern in a reference frame fixed to the fluid at infinity can be found by superposing a uniform velocity U to the left. This cancels out the first term in (9.53), giving:

which gives the streamline pattern for a sphere moving from right to left in front of an observer (Figure 9.19). The pattern is symmetric between the upstream and the downstream directions, which is a result of the linearity of the governing equation (9.48); reversing the direction of the free-stream velocity merely changes u to −u and p – p∞ to −p + p∞. The flow therefore does not leave a velocity-field wake behind the sphere.
In spite of its fame and success, the Stokes solution is not valid at large distances from the sphere because the advective terms are not negligible compared to the viscous terms at these distances. At large distances, the viscous terms are of the order:

while from (9.54), the largest inertia term is:

therefore:

which shows that the inertia forces are not negligible for distances larger than r/a ∼ 1/Re.
Solutions of problems involving a small parameter can be developed in terms of a perturbation series in which the higher-order terms act as corrections on the lower-order terms. If we regard the Stokes solution as the first term of a series expansion in the small parameter Re, then the expansion is not uniformly valid because it breaks down as r → ∞. If we tried to calculate the next term (to order Re) of the perturbation series, we would find that the velocity corresponding to the higher-order term becomes unbounded compared to that of the first term as r → ∞.
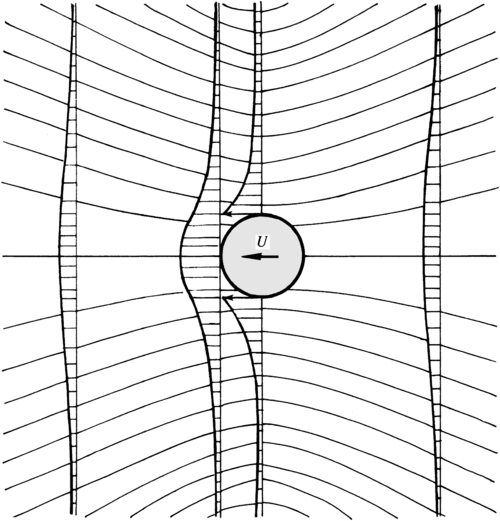
Figure 9.19 Streamlines and velocity distributions in Stokes’ solution of creeping flow due to a moving sphere. Note the upstream and downstream symmetry, which is a result of complete neglect of nonlinearity.
The situation becomes worse for two-dimensional objects such as the circular cylinder. In this case, the Stokes balance, ∇p = μ∇2u, has no solution at all that can satisfy the uniform-flow boundary condition at infinity. From this, Stokes concluded that steady, slow flows around cylinders cannot exist in nature. It has now been realized that the non-existence of a first approximation of the Stokes flow around a cylinder is due to the singular nature of low Reynolds number flows in which there is a region of non-uniformity for r → ∞. The non-existence of the second approximation for flow around a sphere is due to the same reason. In a different (and more familiar) class of singular perturbation problems, the region of non-uniformity is a thin layer (the boundary layer) near the surface of an object. This is the class of flows with Re → ∞, that are discussed in the next chapter. For these high Reynolds number flows the small parameter 1/Re multiplies the highest-order derivative in the governing equations, so that the solution with 1/Re identically set to zero cannot satisfy all the boundary conditions. In low Reynolds number flows this classic symptom of the loss of the highest derivative is absent, but it is a singular perturbation problem nevertheless.
Oseen (1910) provided an improvement to Stokes’ solution by partly accounting for the inertia terms at large distances. He made the substitutions:

where u′, v′, and w′ are the Cartesian components of the perturbation velocity, and are small at large distances. Substituting these, the advection term of the x-momentum equation becomes:

Neglecting the quadratic terms, a revised version of the equation of motion (9.48) becomes:
where u′i represents u′, v′, or w′. This is called Oseen’s equation, and the approximation involved is called Oseen’s approximation. In essence, the Oseen approximation linearizes the advective acceleration term u·∇u to U(∂u/∂x), whereas the Stokes approximation drops advection altogether. Near the body both approximations have the same order of accuracy. However, the Oseen approximation is better in the far field where the velocity is only slightly different from U. The Oseen equations provide a lowest-order solution that is uniformly valid everywhere in the flow field.
The boundary conditions for a stationary sphere with the fluid moving past it at velocity Uex are:

on the sphere’s surface. The solution found by Oseen is:
 (9.58)
(9.58)
where Re = 2aU/ν. Near the surface r/a ≈ 1, a series expansion of the exponential term shows that Oseen’s solution is identical to the Stokes solution (9.53) to the lowest order. The Oseen approximation predicts that the drag coefficient is:
which should be compared with the Stokes formula (9.57). Experimental results show that the Oseen and the Stokes formulas for CD are both fairly accurate for Re < 5 (experimental results fall between them), an impressive range of validity for a theory developed for Re → 0.
The streamlines corresponding to the Oseen solution (9.58) are shown in Figure 9.20, where a uniform flow of U is added to the left to generate the pattern of flow due to a sphere moving in front of a stationary observer. It is seen that the flow is no longer symmetric, but has a wake where the streamlines are closer together than in the Stokes flow. The velocities in the wake are larger than in front of the sphere. Relative to the sphere, the flow is slower in the wake than in front of the sphere.
In 1957, Oseen’s correction to Stokes’ solution was rationalized independently by Kaplun (1957), and Proudman and Pearson (1957) in terms of matched asymptotic expansions. Higher-order corrections were obtained by Chester and Breach (1969).
Example 9.11
By treating small water droplets in air as a solid objects, determine the settling velocities and Reynolds numbers of a naturally occurring cloud and falling-mist droplets with diameters d = 10 μm and d = 100 μm at 20°C
Solution
The settling (or terminal) velocity, U, occurs when the droplet's weight (minus buoyancy) is balanced by its viscous drag.

where μa is the air's viscosity, and ρa and ρw are the air and water densities, respectively. Thus, the fog droplet's settling velocity is:

and this is low enough so that weak vertical air currents can keep the droplet suspended. Its Reynolds number is Re = ρaUd/μa = (1.2 kgm–3)(0.003 ms–1)(10–5 m)/(1.8 × 10–5 kgm–1s–1) = 0.002.
The falling mist droplet is 10 times larger so it’s settling velocity is 100 times larger, U = 0.30 ms–1, and its Reynolds number is 1000 times larger, Re = 2. Droplets of this size typically descend through the atmosphere and grow to become raindrops or shrink to become cloud droplets, depending on the local thermodynamic conditions.