Chapter 7
Measurement parameters and image contrast
As mentioned in Chapter 6, many of the measurement parameters of a pulse sequence may be modified through the user interface software. The particular parameters will be determined by the scanner manufacturer, based on the template pulse sequence (which parameters are appropriate for modification) and the desired interface design (which parameters should the operator be allowed to modify). There are three general criteria that should be considered when modifying any measurement parameter as described in Chapter 5: acceptable scan time, adequate spatial resolution, and sufficient contrast between tissues relative to the background noise (contrast-to-noise ratio). These criteria are often in conflict in clinical imaging. For example, obtaining images with high spatial resolution (pixel sizes  ) and high contrast-to-noise ratio between tissues will require long scan times due to signal averaging. For each scan, the important criterion must be identified so that appropriate parameter variations can be made. One complication is that, while the scan time and spatial resolution for the final image can be calculated before the scan begins, the contrast-to-noise ratio cannot be determined prior to the measurement. This is because the measured signal amplitude depends on the specific tissue(s) within the imaging volume and their relaxation times. Another complication is that the most important criterion may change, depending on the anatomical region under observation. For example, imaging of the central nervous system will normally have scans with longer measurement times so that higher spatial resolution and contrast-to-noise ratios can be obtained. By comparison, to reduce motion, imaging of the thoracic or abdominal cavity employs scans with short measurement times and will compromise on the spatial resolution and contrast-to-noise ratio to achieve them.
) and high contrast-to-noise ratio between tissues will require long scan times due to signal averaging. For each scan, the important criterion must be identified so that appropriate parameter variations can be made. One complication is that, while the scan time and spatial resolution for the final image can be calculated before the scan begins, the contrast-to-noise ratio cannot be determined prior to the measurement. This is because the measured signal amplitude depends on the specific tissue(s) within the imaging volume and their relaxation times. Another complication is that the most important criterion may change, depending on the anatomical region under observation. For example, imaging of the central nervous system will normally have scans with longer measurement times so that higher spatial resolution and contrast-to-noise ratios can be obtained. By comparison, to reduce motion, imaging of the thoracic or abdominal cavity employs scans with short measurement times and will compromise on the spatial resolution and contrast-to-noise ratio to achieve them.
As mentioned above, the specific parameters that are variable within the user interface and their specific definitions will be determined by the manufacturer. However, many parameters are commonly available in most pulse sequences. One approach to categorizing them is by their effect on the final image. Intrinsic parameters modify the inherent signal produced by a volume element of tissue (voxel). These parameters probe the characteristic tissue properties that are the response to the measurement procedure. Intrinsic parameters affect only the signal-producing portion of the image, which is normally patient anatomy and not background air. Extrinsic parameters influence the mechanics of data collection (e.g., voxel size) or other factors external to the tissue. They typically affect the spatial resolution or general background noise levels in the final image. Many of these parameters are specific to the particular choice of pulse sequence used for the measurement and may not be available in all instances. The definitions below are the common ones for these parameters.
7.1 Intrinsic parameters
7.2 Extrinsic parameters
Slice thickness, TH, measured in mm, is the volume of tissue in the slice selection direction that absorbs the RF energy during excitation and generates the signal. Variation in slice thickness is usually accomplished through changing the magnitude of  . Thicker slices provide more signal per voxel whereas thinner slices produce less partial volume averaging.
. Thicker slices provide more signal per voxel whereas thinner slices produce less partial volume averaging.
Slice gap, measured in mm, is the space between adjacent slices. The slice gap may also be expressed as a fraction of the slice thickness, depending on the operating software. The slice gap allows the user to control the size of the total imaging volume by increasing or decreasing the space between slices. The slice gap also provides a method to compensate for the imperfect RF excitation pulses. If the slices are closely spaced, excitation pulses applied to adjacent slice position partially overlap and excite the same region of tissue because the slice excitation profiles are not uniform. This situation is known as crosstalk (Figure 7.4). Due to the rapid RF pulse application, these regions of overlap become saturated and contribute little to the detected signal. The slice gap allows space between adjacent slice positions and reduces the extent of crosstalk for the measurement.
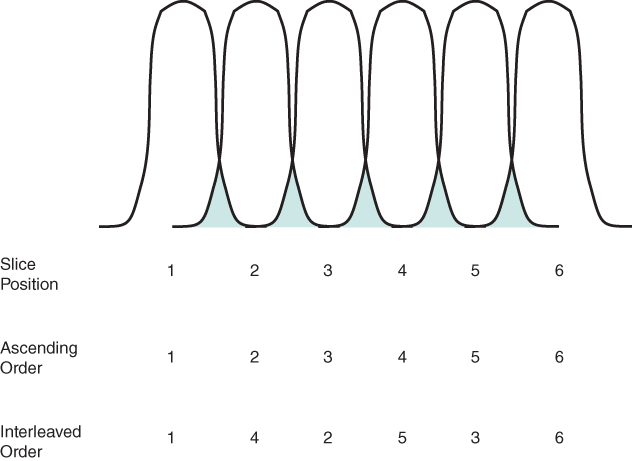
Figure 7.4 Excitation order and crosstalk. If the slices are closely spaced, the bases of adjacent slices overlap (crosshatched regions). Tissues located in this overlap region experience RF pulses from both slices and become saturated. This double excitation called crosstalk, causes reduced signal from these regions. The order of slice excitation also determines the contribution of crosstalk to the image intensity. Ascending order of excitation (second row) acquires data from adjacent slice positions in successive time periods. Interleaved ordering (third row) acquires data from every other slice position first, then acquires data from the intermediate positions. This ordering will minimize the effects of crosstalk between all slices.
Excitation order refers to the temporal order in which slices are excited during the measurement. Two ordering schemes are typically used (see Figure 7.4). Sequential ordering excites adjacent slice positions in successive time periods. This approach is preferred when relative timing of adjacent slices is critical, such as for electrocardiogram-triggered studies of the heart (see Chapter 10). Interleaved ordering excites alternate slices in successive time periods. Interleaved ordering allows the maximum amount of time for T1 relaxation of the overlap region prior to the subsequent excitation pulse. The effects of crosstalk are reduced for all slices as much as possible. Arbitrary ordering may also be performed if permitted by the operating software.
The number of partitions,  , is used in 3D volume studies and corresponds to the number of slices into which the excited volume is divided. The slices have a signal derived from the total excited volume and are contiguous. The effective slice thickness is the volume excited (thickness) divided by
, is used in 3D volume studies and corresponds to the number of slices into which the excited volume is divided. The slices have a signal derived from the total excited volume and are contiguous. The effective slice thickness is the volume excited (thickness) divided by  . The scan time for a 3D sequence is linearly proportional to
. The scan time for a 3D sequence is linearly proportional to  (equation (4.8)).
(equation (4.8)).
The field of view, FOV, measured in  , specifies the area from which the MR signals are accurately sampled. The FOV may be specified separately for the readout and phase encoding directions (permitting anisotropic or rectangular FOV) or it may be listed as a single number (isotropic or square FOV). Decreasing the FOV is accomplished by increasing the corresponding gradient amplitude. Increasing spatial resolution may be achieved by decreasing the FOV, which decreases the voxel size at the expense of the SNR.
, specifies the area from which the MR signals are accurately sampled. The FOV may be specified separately for the readout and phase encoding directions (permitting anisotropic or rectangular FOV) or it may be listed as a single number (isotropic or square FOV). Decreasing the FOV is accomplished by increasing the corresponding gradient amplitude. Increasing spatial resolution may be achieved by decreasing the FOV, which decreases the voxel size at the expense of the SNR.
The acquisition matrix  defines the raw data sampling grid used for the measurement of the base image. It consists of two numbers: one specifies the number of phase encoding steps
defines the raw data sampling grid used for the measurement of the base image. It consists of two numbers: one specifies the number of phase encoding steps  and the other specifies the number of readout sampling data points
and the other specifies the number of readout sampling data points  . Different manufacturers have different conventions regarding which number is specified first. The acquisition matrix divides the FOV into individual areas which, together with the slice thickness, define the voxel size. Increased spatial resolution may be obtained by using larger acquisition matrices to produce smaller voxels. Data acquired beyond that necessary for defining the image FOV is referred to as oversampling and is used to reduce the presence of high-frequency aliasing artifacts (see Chapter 9) and increase the SNR (see Chapter 5). Oversampling in the readout direction does not increase the measurement time, while oversampling in the phase encoding direction increases the scan time proportional to the amount of oversampling.
. Different manufacturers have different conventions regarding which number is specified first. The acquisition matrix divides the FOV into individual areas which, together with the slice thickness, define the voxel size. Increased spatial resolution may be obtained by using larger acquisition matrices to produce smaller voxels. Data acquired beyond that necessary for defining the image FOV is referred to as oversampling and is used to reduce the presence of high-frequency aliasing artifacts (see Chapter 9) and increase the SNR (see Chapter 5). Oversampling in the readout direction does not increase the measurement time, while oversampling in the phase encoding direction increases the scan time proportional to the amount of oversampling.
The number of signal averages,  (also known as
(also known as  , the number of excitation pulses), is the number of times the signal from a given slice for a given phase encoding amplitude is measured and added together. Signal averaging is performed in order to increase the SNR ratio. Depending on the operating software, all acquisitions may be performed at each phase encoding amplitude for a slice, or the entire set of phase encoding amplitudes may be measured for each slice before performing the second acquisition for any slice. The SNR is proportional to the square root of
, the number of excitation pulses), is the number of times the signal from a given slice for a given phase encoding amplitude is measured and added together. Signal averaging is performed in order to increase the SNR ratio. Depending on the operating software, all acquisitions may be performed at each phase encoding amplitude for a slice, or the entire set of phase encoding amplitudes may be measured for each slice before performing the second acquisition for any slice. The SNR is proportional to the square root of  while the measurement time is proportional to NSA.
while the measurement time is proportional to NSA.
The receiver bandwidth,  , measured in Hz, is the maximum frequency (Nyquist frequency) that can be accurately digitized. The Nyquist frequency depends on the sampling time and
, measured in Hz, is the maximum frequency (Nyquist frequency) that can be accurately digitized. The Nyquist frequency depends on the sampling time and  . The receiver bandwidth may also be expressed as the total bandwidth over the entire readout FOV or as the bandwidth per pixel (frequency resolution), depending on the particular convention. A lower
. The receiver bandwidth may also be expressed as the total bandwidth over the entire readout FOV or as the bandwidth per pixel (frequency resolution), depending on the particular convention. A lower  improves the SNR at the expense of potentially larger chemical shift artifacts (see Chapter 9).
improves the SNR at the expense of potentially larger chemical shift artifacts (see Chapter 9).