4
The Walking/Gait Cycle and Its Relationship to the Pelvis
Most of us, I would say, take walking for granted—it is something that we just do without understanding what exactly is going on … until we suffer pain somewhere in our body, and then the simple action of walking becomes very painful. What I would like to do in this chapter is examine in detail what exactly takes place when we walk (you might want to go through some of the movements yourself as they are described) and the relationship of the gait cycle to both the pelvis and the kinetic chain.
Gait Cycle
Definition: A gait cycle is a sequence of events in walking or running, beginning when one foot contacts the ground and ending when the same foot contacts the ground again.
The gait cycle is divided into two main phases: the stance phase and the swing phase. Each cycle begins at initial contact (also known as heel-strike) of the leading leg in a stance phase, proceeds through a swing phase, and ends with the next contact of the ground with that same leg. The stance phase is subdivided into heel-strike, mid-stance, and propulsion phases.
Human gait is a very complicated, coordinated series of movements. An easier way of thinking about the gait cycle is to break it down into phases. The stance phase is the weight-bearing component of each cycle; it is initiated by heel-strike and ends with toe-off from the same foot. The swing phase is initiated with toe-off and ends with heel-strike. It has been estimated that the stance phase accounts for approximately 60% of a single gait cycle, and the swing phase for approximately 40%, as shown in Figure 4.1.
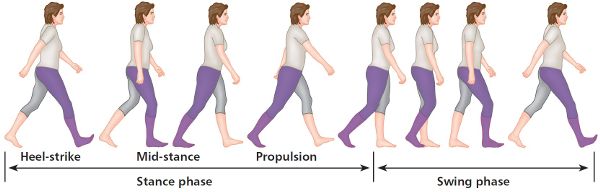
Figure 4.1. Stance and swing phases of the gait cycle.
Heel-Strike
If you think about the position of your body just before you contact the ground with your right leg during the contact phase of the stance phase, the right hip is in a position of flexion, the knee is extended, the ankle is dorsiflexed, and the foot is in a position of supination, as shown in Figure 4.2. The tibialis anterior muscle, with the help of the tibialis posterior, works to maintain the ankle/foot in a position of dorsiflexion and inversion (inversion is one part of the motion referred to as supination).
In normal gait, the foot strikes the ground at the beginning of the heel-strike in a supinated position of approximately 2 degrees. A normal foot will then move through 5–6 degrees of pronation at the subtalar joint (STJ) to a position of approximately 3–4 degrees of pronation, as this will allow the foot to function as a “mobile adaptor.”
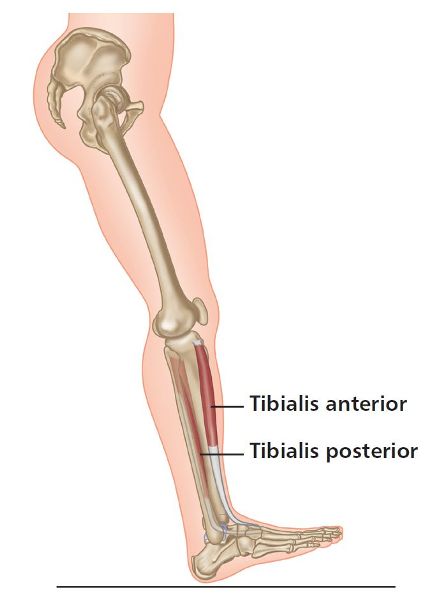
Figure 4.2. The position of the leg just before heel-strike.
A Myofascial Link
As a result of the ankle and foot being in a position of dorsiflexion and supination, the tibialis anterior (which is the main muscle responsible for this anatomical position, with an insertion on the medial cuneiform and 1st metatarsal on the foot) is now part of a link system that we will call a myofascial sling (see Chapter 3). This sling, starting from the initial origin of the tibialis anterior, continues as the insertion of the peroneus longus (onto the 1st metatarsal and medial cuneiform, as in the case of the tibialis anterior) to its muscular origin on the lateral side and head of the fibula. This bony landmark is also where the biceps femoris muscle inserts.
The sling now continues as the biceps femoris muscle toward its origin on the ischial tuberosity, where the muscle attaches to the tuberosity via the sacrotuberous ligament; often the biceps femoris directly attaches to this ligament rather than to the ischial tuberosity, and some authors have mentioned that potentially 30% or more of the biceps femoris attaches directly to the ILA of the sacrum. If you think back to Chapter 1, I mentioned that Vleeming et al. (1989a) found that in 50% of subjects, part of the sacrotuberous ligament was continuous with the tendon of the long head of the biceps femoris.
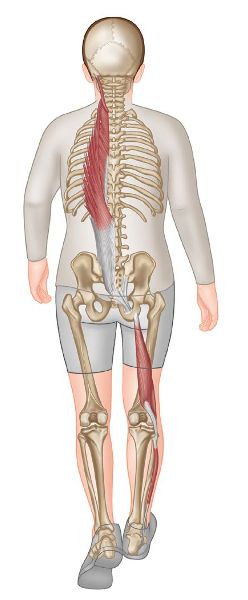
Figure 4.3. A person walking, with the posterior (deep) longitudinal sling muscles highlighted.
The sling then carries on as the sacrotuberous ligament, which attaches to the inferior aspect of the sacrum at the ILA and fascially connects to the contralateral (opposite side) multifidi and to the erector spinae, which continue to the base of the occipital bone. This myofascial sling is known as the posterior longitudinal sling (PLS) or the deep longitudinal sling (DLS), as shown in Figure 4.3.
Even before you initiate the contact to the ground through heel-strike, dorsiflexion of the ankle (by the contraction of the tibialis anterior) initiates a coactivation of the biceps femoris and peroneus longus just prior to heel-strike. Studies have shown that the biceps femoris communicates with the peroneus longus at the fibular head, transmitting approximately 18% of the contraction force of the biceps femoris through the fascial system into the peroneus longus muscle. This co-contraction therefore serves to “wind up” the thoracolumbar fascia mechanism as a means of stabilizing the lower extremity; this results in the storage of the necessary kinetic energy that will subsequently be released during the propulsive phase of the gait cycle.
The posterior (deep) longitudinal sling as described is being fascially tensioned; the increased tension is focused on the sacrotuberous ligament via the attachment of the biceps femoris, as shown in Figure 4.4(b). This connection will assist the force closure mechanism process of the SIJ; in simple terms, this creates a self-locking and stable pelvis for the initiation of the weight-bearing gait cycle. You may also notice that the right ilium (see Figure 4.4(a–c)) undergoes posterior rotation during the swing phase, which will assist the force closure of the SIJ because of the increased tension in the sacrotuberous ligament.
You can also see from Figure 4.4(c), overleaf, that there is now tension developing within the right sacrotuberous ligament because of the contraction of the biceps femoris as well as the posterior rotation of the right innominate; at the same time, the left innominate is rotating anteriorly and the sacrum has rotated on the left oblique axis (L-on-L). This specific motion of the lumbopelvic hip complex occurs all at the same time as the right heel-strike.
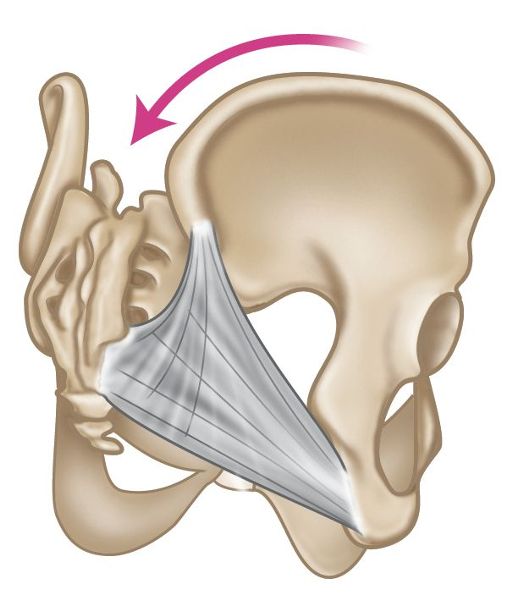
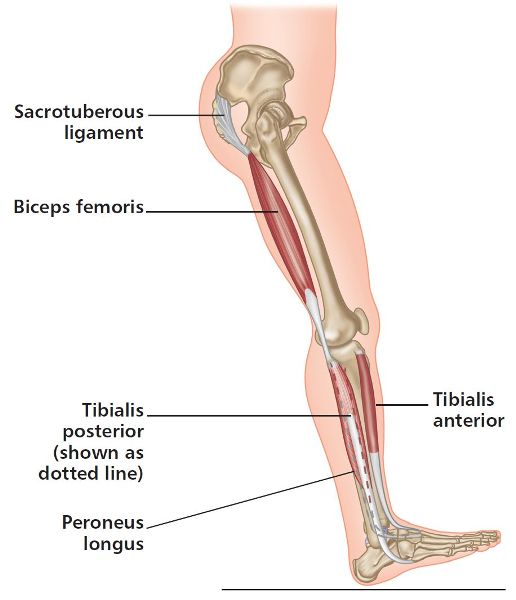
Figure 4.4. (b) Position of the leg just before heel-strike, with the biceps femoris and sacrotuberous ligament tensioned.
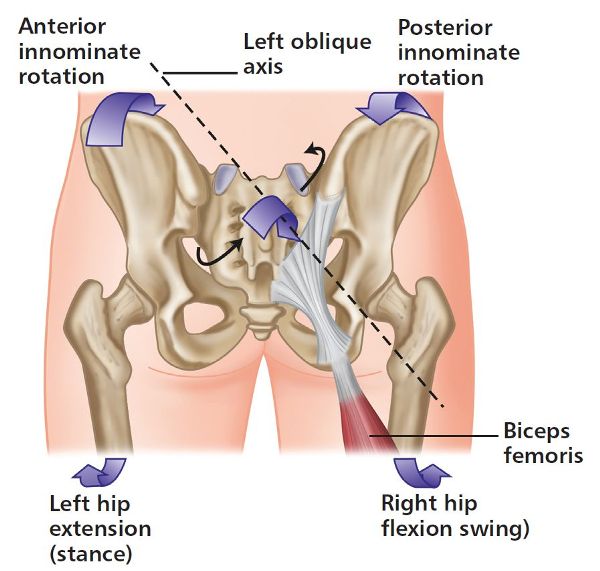
Figure 4.4. (c) Right ilium in posterior rotation—left ilium in anterior rotation and sacrum rotated on the L-on-L axis.
For the next phase, you might want to stand and slowly go through the following movements so that you can get a sense of what happens with your body in the normal walking cycle. As explained above, just before the heel-strike phase your hip will be flexed, your knee extended, and your ankle dorsiflexed with the foot supinated. The tibialis anterior and tibialis posterior maintain this position of the ankle and foot, and as you contact the ground, these two muscles are responsible for controlling the rate of pronation through the STJ by contracting eccentrically.
As your right leg moves from heel-strike to toe-off (stance phase), your body weight begins to move over your right leg, causing your pelvis to shift laterally to the right. As the movement continues toward toe-off, your right pelvic innominate bone begins to rotate anteriorly while your left innominate bone begins to rotate posteriorly.
As you proceed through the gait cycle, you now enter the mid-stance phase of gait. This is where the hamstrings should reduce their tension because of the natural anterior rotation of the pelvis and the slackening of the sacrotuberous ligament. Form closure at this point is gradually lost during the latter part of the stance phase, so that stability at this point is chiefly maintained through force closure. This is the point during the mid-stance phase where the Gmax on the right side should take the role of the continued movement of lower limb extension, as well as working in concert with the contralateral latissimus dorsi (left side). The active contraction of these two muscles increases the tension in the thoracolumbar fascia (posterior oblique sling), thus providing the necessary force closure stability to the right SIJ during the mid-stance phase of gait.
I would like to elaborate a little more on this process. Phasic contraction of the Gmax occurs in the mid-stance phase; the Gmax simultaneously contracts with the contralateral latissimus dorsi—it is this muscle that will extend the arm through what is known as counter-rotation, to assist in propulsion. The thoracolumbar fascia, which is a sheet of connective tissue, is located between the Gmax and the contralateral latissimus dorsi; this fascial structure is forced to increase its tension because of the contractions of the Gmax and latissimus dorsi. This increased tension will assist in stabilizing the SIJ of the stance leg through the force closure mechanism.
In Figure 4.5 you can see that just before heel-strike, the Gmax will reach maximum stretch as the latissimus dorsi is being stretched by the forward swing of the opposite arm. Heel-strike signifies a transition to the propulsive phase of gait, at which time the Gmax contraction is superimposed on that of the hamstrings.
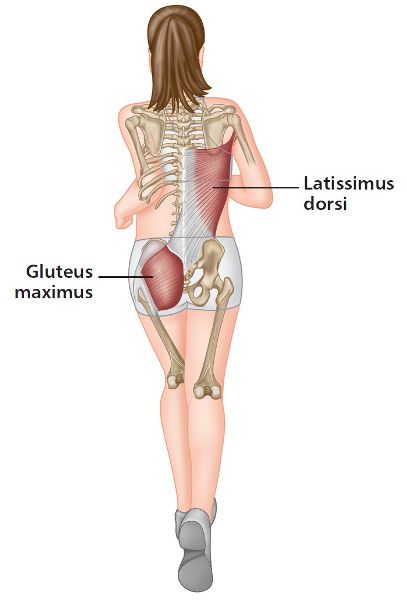
Figure 4.5. A person running, with the posterior oblique sling muscles highlighted.
As explained in the previous paragraphs, activation of the Gmax occurs in concert with contraction of the contralateral latissimus dorsi, which is now extending the arm in unison with the propelling leg. The synergistic contraction of the Gmax and the contralateral latissimus dorsi creates a state of tension within the thoracolumbar fascia, which will be released in a surge of energy that will assist the muscles of locomotion. This stored energy within the thoracolumbar fascia helps to reduce the overall energy expenditure of the gait cycle. Janda (1992, 1996) mentions that poor Gmax strength and activation is postulated to decrease the efficiency of gait. The posterior oblique sling also contains a lower component (consisting of the continuations of the Gmax), which acts to increase the tension of the iliotibial band (ITB); this helps to stabilize the knee during the stance phase of gait.
As we progress from the mid-stance phase to heel-lift and propulsion, the foot begins to re-supinate and passes through a neutral position when the propulsive phase begins; the foot continues in supination through toe-off. As a result of the foot supinating during the mid-stance propulsive period, the foot is converted from a “mobile adaptor” (which is what it is during the contact period) to a “rigid lever” as the mid-tarsal joint locks into a supinated position. With the foot functioning as a rigid lever (as a result of the locked mid-tarsal joint) during the time immediately preceding toe-off, the weight of the body is propelled more efficiently.
Pelvis and SIJ Motion
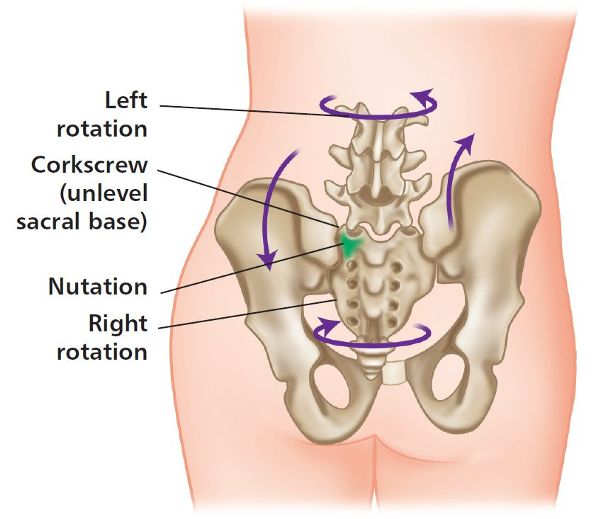
Next we will take a look at the pelvis and how it functions during the mid-stance phase of the walking cycle. As the right innominate bone starts to rotate anteriorly from an initial posteriorly rotated position, the tension of the right sacrotuberous ligament is reduced, and the sacrum will be forced to move (passively) into a right torsion on the right oblique axis (R-on-R) (recall, the motion of the pelvis and sacroiliac joint in Chapter 2). In other words, the sacrum rotates to the right and side bends to the left, because the left sacral base moves into an anterior nutation position (this is also known as Type I spinal mechanics, as the rotation and side bending are coupled to opposite sides—see Chapter 6); the motion is illustrated in Figure 4.6(a).
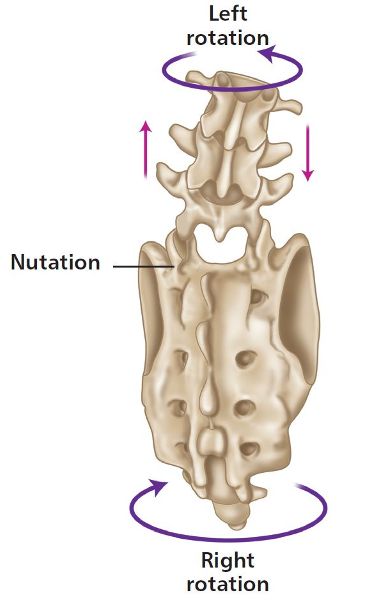
Figure 4.6. (a) Sacral rotation and lumbar counter-rotation.
We also need to mention and consider that, as the left side of the sacrum moves forward into nutation, the right side of the sacral base will move backward into counter-nutation (R-on-R); this is mainly because of the slackening of the right sacrotuberous ligament and the continual anterior rotational movement of the right innominate bone during mid-stance.
Owing to the kinematics of the sacrum, the lumbar spine rotates left (opposite to the sacrum) and side bends to the right (Type I mechanics), as shown is Figure 4.6(b). The thoracic spine rotates right (same as the sacrum) and side bends to the left, and the cervical spine rotates right and side bends to the right. The cervical spine coupling is opposite to that of the other vertebrae, since its specific spinal motion is classified as Type II spinal mechanics (Type II means that rotation and side bending are coupled to the same side—see Chapter 6 for more details).
As the left leg moves from weight bearing to toe-off, the left innominate, the sacrum, and the lumbar and thoracic vertebrae undergo sacral torsion, rotation, and side bending in a similar manner to that described above, but with movements in the opposite directions.
The anterior oblique also works in conjunction with the stance leg adductors, ipsilateral internal oblique, and contralateral external oblique muscles, as shown in Figure 4.7. These integrated muscle contractions help stabilize the body on top of the stance leg and assist in rotating the pelvis forward for optimum propulsion in preparation for the ensuing heel-strike.
The abdominal oblique muscles, as well as the adductor muscle group, serve to provide stability and mobility during the gait cycle.
When looking at the EMG recordings of the oblique abdominals during gait and superimposing them on the cycle of adductor activity in gait, Basmajan and De Luca (1979) found that both sets of muscles (obliques and adductors) contribute to stability at the initiation of the stance phase of the gait cycle, as well as to the rotation of the pelvis and the action of pulling the leg through during the swing phase of gait. (This was also demonstrated by Inman et al. (1981).) As the speed of walking increases to running and sprinting speeds, the activation of the anterior oblique system becomes more prominent as well as a necessity.
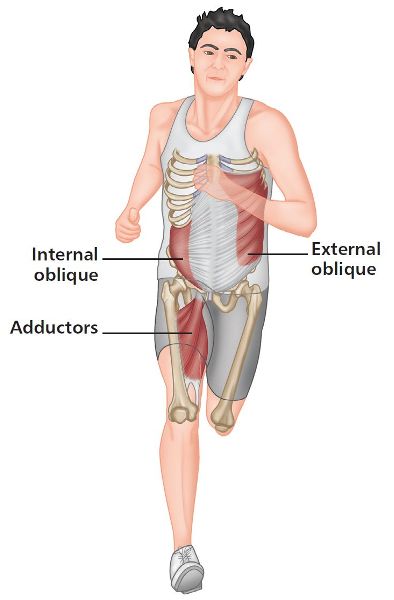
Figure 4.7. A person running, with anterior oblique sling muscles highlighted.
The swing phase of gait utilizes the lateral sling system, as we have now entered the single-leg stance position. This sling connects the Gmed and Gmin of the stance leg, and the ipsilateral (same side) adductors, with the contralateral (opposite) QL. Contraction of the left Gmed and adductors stabilizes the pelvis, and activation of the contralateral QL will assist in elevation of the pelvis; this will allow enough lift of the pelvis to permit the leg to go through the swing phase of gait. The lateral sling plays a critical role, as it assists in stabilizing the spine and hip joints in the frontal plane and is a necessary contributor to the overall stability of the pelvis and trunk.
Not only does the lateral sling system provide stability that protects the working spinal and hip joints, but it is also a necessary contributor to the overall stability of the pelvis and trunk. Should the trunk become unstable, the diminished stability will compromise one’s ability to generate the forces necessary for moving the swing leg quickly, as required in many work and sports environments. Attempts to move the swing leg, or to generate force with the stance leg during gait and other functional activities, can easily disrupt the SIJs and symphysis pubis and cause kinetic dysfunction in joints throughout the entire kinetic chain (Chek 1999).
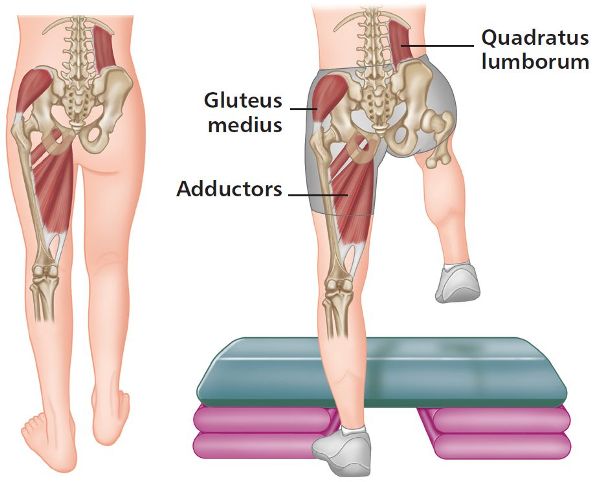
Figure 4.8. An example of the swing phase of gait, with lateral sling muscles highlighted on the single-stance leg.
Maitland (2001) mentions that proper body movement while walking is influenced by the ability of the sacrum to cope with left torsion on the left oblique axis (L-on-L) and right torsion on the right oblique axis (R-on-R). Since most walking is accomplished with the vertebral column relatively upright and vertical, for the purpose of this discussion we will assume that your spine and sacrum are in neutral while you walk.
The way our axial skeletal system alternately undulates in side bending and rotation as we walk is very interesting and extremely important to our overall well-being. It is a movement that is reminiscent of the undulating action of a snake as it slithers through the grass. The big difference between a snake and a human, of course, is that our snakelike spine has ended up being given two legs on which to walk.
Summary of the Sacrum and the Gait Cycle
To summarize the gait cycle and the specific motion of the sacral spine, the sacrum is capable of left rotation on the left oblique axis (L-on-L), from which it then returns to a neutral position. From this neutral position the sacrum then rotates to the right on the right oblique axis (R-on-R) and again returns to neutral. The movement of the sacrum is anterior in its nature as it undergoes the earlier-described motion of nutation. The forward nutational movement during walking is anterior on one side, followed by a return to the neutral position; anterior nutation then occurs on the opposite side, before the sacrum again returns to neutral. This process is continually repeated. According to various studies, the motion of posterior nutation (counter-nutation) does not appear to extend past the neutral position during the normal walking/gait cycle.