The equations of fluid motion in a noninertial frame of reference are developed in this section. The equations of motion given in Sections 4.4 through 4.6 are valid in an inertial frame of reference, one that is stationary or that is moving at a constant speed with respect to a stationary frame of reference. Although a stationary frame of reference cannot be defined precisely, a frame of reference that is stationary with respect to distant stars is adequate for present purposes. Thus, noninertial-frame effects may be found in other frames of reference known to undergo nonuniform translation and rotation. For example, the fluid mechanics of rotating machinery is often best analyzed in a rotating frame of reference, and modern life commonly places us in the noninertial frame of reference of a moving and maneuvering vehicle. Fortunately, in many laboratory situations, the relevant distances and time scales are short enough so that a frame of reference attached to the earth (sometimes referred to as the laboratory frame of reference) is a suitable inertial frame of reference. However, in atmospheric, oceanic, or geophysical studies where time and length scales are much larger, the earth’s rotation may play an important role, so an earth-fixed frame of reference must often be treated as a noninertial frame of reference.
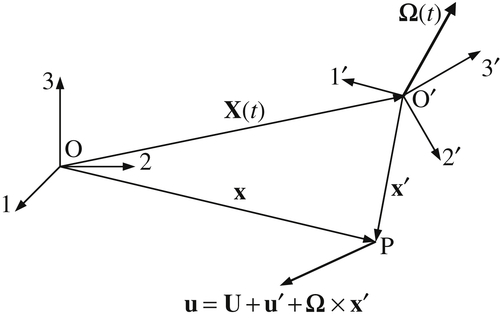
In a noninertial frame of reference, the continuity equation (4.7) is unchanged but the momentum equation (4.38) must be modified. Consider a frame of reference O′1′2′3′ that translates at velocity dX(t)/dt = U(t) and rotates at angular velocity Ω(t) with respect to a stationary frame of reference O123 (see Figure 4.6). The vectors U and Ω may be resolved in either frame. The same clock is used in both frames so t = t′. A fluid particle P can be located in the rotating frame at x′=(x1′,x2′,x3′) or in the stationary frame at x = (x1,x2,x3), and these distances are simply related via vector addition: x = X + x′. The velocity u of the fluid particle is obtained by time differentiation:
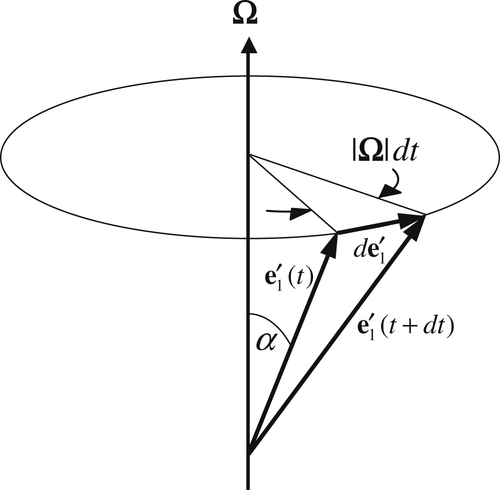
where the final equality is based on the geometric construction of the cross product shown in Figure 4.7 for e1′, one of the unit vectors in the rotating frame. In a small time dt, the rotation of O′1′2′3′ causes e1′ to trace a small portion of a cone with radius sinα as shown. The magnitude of the change in e1′ is |e1′|=(sinα)|Ω|dt, so d|e1′|/dt=(sinα)|Ω|, which is equal to the magnitude of Ω×e1′. The direction of the rate of change of e1′ is perpendicular to Ω and e1′, which is the direction of Ω×e1′. Thus, by geometric construction, de1′/dt=Ω×e1′, and by direct extension to the other unit vectors, dei′/dt=Ω×ei′ (in mixed notation).
Figure 4.6 Geometry showing the relationship between a stationary coordinate system O123 and a noninertial coordinate system O′1′2′3′ that is moving, accelerating, and rotating with respect to O123. In particular, the vector connecting O and O′ is X(t) and the rotational velocity of O′1′2′3′ is Ω(t). The vector velocity u at point P in O123 is shown. The vector velocity u′ at point P in O′1′2′3′ differs from u because of the motion of O′1′2′3′.
Figure 4.7 Geometry showing the relationship between Ω, the rotational velocity vector of O′1′2′3′, and the first coordinate unit vector e1′ in O′1′2′3′. Here, the increment de1′ is perpendicular to Ω and e1′.
To find the acceleration a of a fluid particle at P, take the time derivative of the final version of (4.42) to find:
(see Exercise 4.50) where dU/dt is the acceleration of O′ with respect to O, a′ is the fluid particle acceleration viewed in the noninertial frame, 2Ω × u′ is the Coriolis acceleration, (dΩ/dt)×x′ is the acceleration caused by angular acceleration of the noninertial frame, and the final term is the centripetal acceleration.
In fluid mechanics, the acceleration a of fluid particles is denoted Du/Dt, so (4.43) is rewritten:
This equation states that fluid particle acceleration in an inertial frame is equal to the sum of: the particle’s acceleration in the noninertial frame, the acceleration of the noninertial frame, the Coriolis acceleration, the particle’s apparent acceleration from the noninertial-frame’s angular acceleration, and the particle’s centripetal acceleration. Substituting (4.44) into (4.39b) produces
as the incompressible-flow momentum conservation equation in a noninertial frame of reference where the primes denote differentiation, velocity, and position in the noninertial frame. Thermodynamic variables and the net viscous stress are independent of the frame of reference. Equation (4.45) makes it clear that the primary effect of a noninertial frame is the addition of extra body force terms that arise from the motion of the noninertial frame. The terms in [,]-brackets reduce to g alone when O′1′2′3′ is an inertial frame (U = constant and Ω=0).
The four new terms in (4.45) may each be significant. The first new term dU/dt accounts for the acceleration of O′ relative to O. It provides the apparent force that pushes occupants back into their seats or makes them tighten their grip on a handrail when a vehicle accelerates. An aircraft that is flown on a parabolic trajectory produces weightlessness in its interior when its acceleration dU/dt equals g.
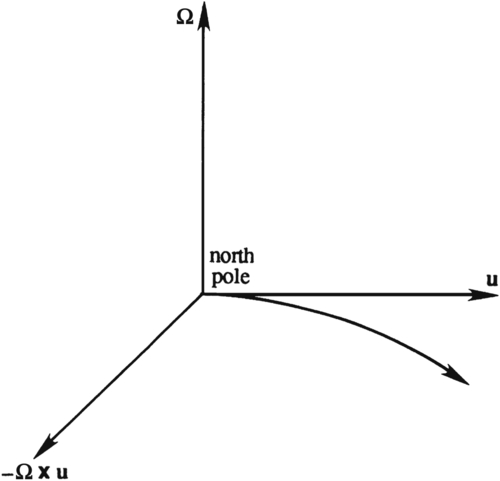
The second new term, the Coriolis term, depends on the fluid particle’s velocity, not on its position. Thus, even at the earth’s rotation rate of one cycle per day, it has important consequences for the accuracy of artillery and for navigation during air and sea travel. The earth’s angular velocity vector Ω points out of the ground in the northern hemisphere. The Coriolis acceleration −2Ω × u therefore tends to deflect a particle to the right of its direction of travel in the northern hemisphere and to the left in the southern hemisphere. Imagine a low-drag projectile shot horizontally from the northpole with speed u (Figure 4.8). The Coriolis acceleration 2Ωu constantly acts perpendicular to its path and therefore does not change the speed u of the projectile. The forward distance traveled in time t is ut, and the deflection is Ωut2. The angular deflection is Ωut2/ut = Ωt, which is the earth’s rotation in time t. This demonstrates that the projectile in fact travels in a straight line if observed from outer space (an inertial frame); its apparent deflection is merely due to the rotation of the earth underneath it. Observers on earth need an imaginary force to account for this deflection. A clear physical explanation of the Coriolis acceleration, with applications to mechanics, is given by Stommel and Moore (1989).
Figure 4.8 Particle trajectory deflection caused by the Coriolis acceleration when observed in a rotating frame of reference. If observed from a stationary frame of reference, the particle trajectory would be straight.
In the atmosphere, the Coriolis acceleration is responsible for wind circulation patterns around centers of high and low pressure in the earth’s atmosphere. In an inertial frame, a nonzero pressure gradient accelerates fluid from regions of higher pressure to regions of lower pressure, as the first term on the right of (4.38) and (4.45) indicates. Imagine a cylindrical polar coordinate system (Figure 3.3c), with the z-axis normal to the earth’s surface and the origin at the center of a high- or low-pressure region in the atmosphere. If it is a high pressure zone, uR would be outward (positive) away from the z-axis in the absence of rotation since fluid will leave a center of high pressure. In this situation when there is rotation, the Coriolis acceleration −2Ω×u=−2ΩzuReφ is in the −φ direction (in the Northern hemisphere), or clockwise as viewed from above. On the other hand, if the flow is inward toward the center of a low-pressure zone, which reverses the direction of uR, the Coriolis acceleration is counterclockwise. In the southern hemisphere, the direction of Ωz is reversed so that the circulation patterns described above are reversed. Although the effects of a rotating frame will be commented on occasionally in this and subsequent chapters, most of the discussion of the Coriolis acceleration is given in Chapter 13, which covers geophysical fluid dynamics.
The third new acceleration term in [,]-brackets in (4.45) is caused by changes in the rotation rate of the frame of reference so it is of little importance for geophysical flows or for flows in machinery that rotate at a constant rate about a fixed axis. However, it does play a role when rotation speed or the direction of rotation vary with time.
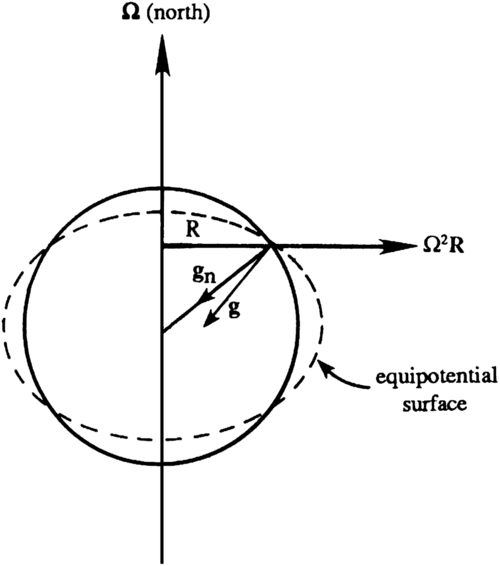
The final new acceleration term in (4.45), the centrifugal acceleration, depends strongly on the rotation rate and the distance of the fluid particle from the axis of rotation. If the rotation rate is steady and the axis of rotation coincides with the z-axis of a cylindrical polar coordinate system so that Ω = (0, 0, Ω) and x′ = (R, φ, z), then –Ω×(Ω×x′) = +Ω2ReR. This additional apparent acceleration can be added to the Newtonian gravitational acceleration gn to define an effective gravityg = gn + Ω2ReR (Figure 4.9). Interestingly, a body-force potential for the new term can be found, but its impact might only be felt for relatively large atmospheric- or oceanic-scale flows (Exercise 4.67). The effective gravity is not precisely directed at the center of the earth and its acceleration value varies slightly over the surface of the earth. The equipotential surfaces (shown by the dashed lines in Figure 4.9) are perpendicular to the effective gravity, and the average sea level is one of these equipotential surfaces. Thus, at least locally on the earth’s surface, we can write Φ=gz, where z is measured perpendicular to an equipotential surface, and g is the local acceleration caused by the effective gravity. Use of the locally correct acceleration and direction for the earth’s gravitational body force in the equations of fluid motion accounts for the centrifugal acceleration and the fact that the earth is really an ellipsoid with equatorial diameter 42km larger than the polar diameter.
Figure 4.9 The earth’s rotation causes it to budge near the equator and this leads to a mild distortion of equipotential surfaces from perfect spherical symmetry. The total gravitational acceleration is a sum of a centrally directed acceleration gn (the Newtonian gravitation) and a rotational correction Ω2R that points away from the axis of rotation.
Example 4.10
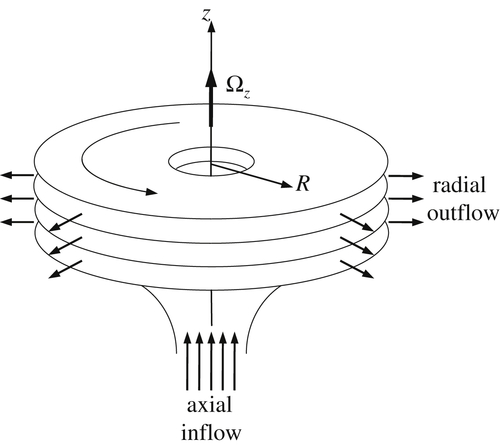
Find the radial and angular fluid momentum equations for viscous flow in the gaps between plates of a von Karman viscous-impeller pump (see Figure 4.10) that rotates at a constant angular speed Ωz. Assume steady constant-density constant-viscosity flow, neglect the body force for simplicity, and use cylindrical coordinates (Figure 3.3c).
Solution
First, a little background. A von Karman viscous impeller pump uses rotating plates to pump viscous fluids via a combination of viscous and centrifugal forces. Although such pumps may be inefficient, they are wear-tolerant and may be used to pump abrasive fluids that would damage the vanes or blades of other pumps. Plus, their pumping action is entirely steady so they can be exceptionally quiet, a feature occasionally exploited for air-moving applications for interior spaces occupied by human beings.
For steady, constant-density, constant-viscosity flow without a body force in a steadily rotating frame of reference, the momentum equation is a simplified version of (4.45):
ρ(u′·∇′)u′=−∇′p+ρ[−2Ω×u′−Ω×(Ω×x′)]+μ∇′2u′.
Figure 4.10 Schematic drawing of the impeller of a von Karman pump (Example 4.10).
Here we are not concerned with the axial inflow or the flow beyond the outer edges of the disks. Now choose the z-axis of the coordinate system to be coincident with the axis of rotation. For this choice, the flow between the disks should be axisymmetric, so we can presume that u′R, u′φ, u′z and p only depend on R and z. To further simplify the momentum equation, drop the primes, evaluate the cross products:
Here we have used the results found in the Appendix B for cylindrical coordinates. In the first two momentum equations, the terms in [,]-brackets result from rotation of the coordinate system.
 that translates at velocity dX(t)/dt = U(t) and rotates at angular velocity Ω(t) with respect to a stationary frame of reference
that translates at velocity dX(t)/dt = U(t) and rotates at angular velocity Ω(t) with respect to a stationary frame of reference  (see Figure 4.6). The vectors U and Ω may be resolved in either frame. The same clock is used in both frames so t = t′. A fluid particle P can be located in the rotating frame at
(see Figure 4.6). The vectors U and Ω may be resolved in either frame. The same clock is used in both frames so t = t′. A fluid particle P can be located in the rotating frame at  or in the stationary frame at x =
or in the stationary frame at x =  , and these distances are simply related via vector addition: x = X + x′. The velocity u of the fluid particle is obtained by time differentiation:
, and these distances are simply related via vector addition: x = X + x′. The velocity u of the fluid particle is obtained by time differentiation: